Kyosho Rockforce 2.2 Crawler SpecsAllgemeines:
SpecsAllgemeines:Typ: 2.2 Crawler
Maßstab: 1:10
Bauart: zwei vertikale Chassisplatten, 50/50 Links, Shafty
Getriebeübersetzung: 1:143,33
Achsen:Schneckengetrieben
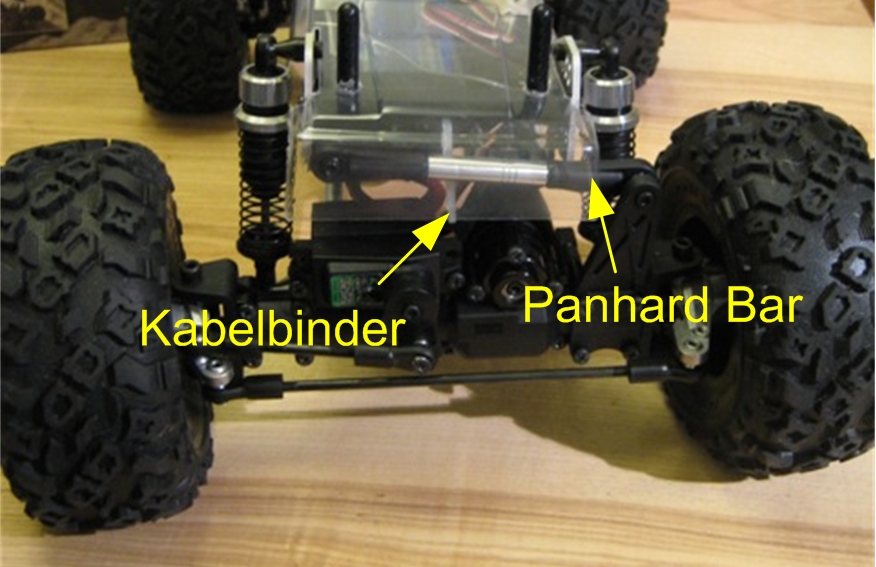
Setup: Sprung (gefedert) mit Kabelbinder
Linkkonstruktion: hinten 4-Link; vorne 3-Link mit Panhard-Bar
Dämpfer: Gewindeöldruckstoßdämpfer
Lagerung: voll kugelgelagert
Maße:Kampfgewicht: ca. 3kg
Radgewicht: leicht, da noch kein Blei
Länge: ca. 422mm
Radstand: ca. 305mm
Breite: mit Testwalzen ca. 285mm
Bodenfreiheit Mitte: 57mm
Bodenfreiheit Differenzial: 40mm
Bodenfreiheit Achse: 45mm
Räder: Kyosho Crawler-Gummis bzw. im Test Losi Rock Carver
Elektrisches:Motor: - Method R 55T von Team Orion (V-förmige Kohlen)
- Silberbüchse a la günstig
Fahrtregler: GM V80R
Servo: - Lenkung: VDS-2015 VORTEX DIGITAL 6V/20kg/0,15s von Team Orion (kugelgelagert mit Titan- und Aluminiumzahnrädern)
- Dig:Hitec HS475BB (4kg)
Akku: 4500er Orion Stickpack
Empfänger: Spektrum 3100
Baukasten - The Force is in a BoxOb die “rock side of the force” bzw. die Steinseite der Macht gut oder schlecht ist, weiß keiner. Die einzig wichtigen Eckdaten sind: Der Raumflug ist mit ihr nicht möglich und sie zertrümmert alles, was ihr in den Weg kommt, besonders Steine. Im grundgenommen so ähnlich wie Chuck Norris, nur ohne Bart und Roundhouse-Kick. Ob er zur Rockforce gehört….

Wer Kyosho Baukasten kennt, weiß bescheid. Wer nicht – wie ich - hat was verpasst.

Die schwarze Kiste - nicht wesentlich größer als ein großer Schuhkarton - beherbergt ein paar Tüten, Deckel samt Decals, Kabelbinder und doppelseitiges Tape, Reifen, das wars und eine deutsche und englische Bauanleitung. Ich dachte in Banamiya-Manier dass ich gleich die Tüte A B und Metallteiletüte xy-gleichzeitig aufreißen müsse, um anzufangen. Aber nein, alles Tüte für Tüte. In der Anleitung steht ich brauche Tüte 1, dann ist auch wirklich alles für diesen Bauabschnitt drin, also können die Setzkästen in den Müll.
Was in diesem Baukasten nicht dabei ist, sind Dämpferöl(150er cst) Schraubensicherungslack, evtl. Kleber und Farbe sowieso nicht. Selbstredend ist auch keinerlei Elektronik dabei. Also auch nicht der Motor und das Servo, wie auf dem Bild zu sehen.
Bis auf Kleinigkeiten, ist der Crawler ein Panzer, LKW, kugelsicher… Egal wie man es nennt, aber massiver als alle bisherigen Baukastencrawler. Die Chassisplatten sind mit ihren 3mm wahrscheinlich wirklich kugelsicher aber auch an dieser Stelle zuungunsten des Schwerpunkts entsprechend schwer. Ich würde den Crawler sogar den „M1+“-Crawler nennen, da überall wo bei anderen M3-Schrauben verbaut sind, werden hier entsprechend mindestens M4-Schrauben oder sogar M5 verwendet. Die Antriebsachsen sind 6mm anstatt der gängigen 5mm. Die Links sind massiver als alles, was bisher da war. M4 Madenschrauben in 8mm-Alustangen. Die Antriebswellen bestehen aus zwei Teilen, die mit einem 3-mm-Sechskantstab verbunden sind. Darüber eine Aluhülse. Pfiffig! Die können quasi beliebig verlängert werden. Nur ein Inbusschlüssel zersägen…
 Wanderschnecken in den Achsen
Wanderschnecken in den AchsenDer Schneckentrieb wie er realisiert ist erzeugt eine sehr hohe Übersetzung (ca. 1:30) in den Achsen, das verringert den Torque-Twist bis auf fast null. Weiterhin sind die Achsen selbsthemmend, d.h. der Crawler rollt am Hang nicht selbstständig ab. Ob sich das im Betrieb bewährt, wird der Fahrtest zeigen. Durch das flach bauende Differenzial gewinnt man mehr Bodenfreiheit im Vergleich zu Standard-Kegelradachsen. Leider sind die Verschraubungen der Achsen an der Unterseite nicht versenkt, was den Differenzialvorteil schmälert. So kann man zwar die Antriebsknochen in den Achsen ohne Auseinanderbau nicht entfernen, wäre aber bei der Massivität eh nicht nötig. Durch die Breite der Achsen liegt das Servo schön tief, und das ab Werk!
 Reifen/Felgen
Reifen/Felgen Kyosho will auch mit den Reifen neue Wege gehen. „Normale“ Crawlerreifen bestehen aus einem relativ weichen Gummi, der durch eine weiche Schaumeinlage gestützt wird. So simuliert man quasi einen Karkassenreifen mit niedrigem Luftdruck, und erreicht damit Seitenhalt trotz großer Auflagefläche. Der Versuch dieses Verhalten ohne Einlage zu erlangen resultiert in einer entsprechend festen und ungeeigneten Gummimischung. Demensprechend bleiben die Baukastenpellen im Baukasten. Die mitgelieferten Felgen bieten sich aufgrund ihres negativen Offsets an, verwendet zu werden, da Standardoffsetfelgen in einem sehr/zu breiten Crawler resultieren würden. Zieht man auf die Baukastenfelgen ein paar Gummis ist die Fahrzeugbreite trotz der Riesenachsen im Maße eines Standard-2,2“-Crawlers. Schöner wären natürlich Beadlocks, aber aufs erste Mal geht halt auch nicht alles. Was bei den Felgen blöd ist, sind die kleinen Schraubenimitate, die es erschweren, die Radmuttern ordentlich festzuschrauben. Wenn der Crawler sich erstmal etabliert, wird’s hierfür bestimmt/hoffentlich auch Beadlockfelgen wie Sand am Meer geben, bei denen all die Radprobleme wegfallen.
16,12,08
AufhängungDie Dämpfer sind im Baukastensetup mit Kabelbindern halb abgespannt. Das erreicht man indem man die Achse bis zum Anschlag verschränkt und die verbleibende Entfernung zwischen Achse und oberem Befestigungspunkt mit einem Kabelbinder abspannt. Das kann zum Wackeldackel des Chassis führen, tut es hier aber nicht. Die Verschränkung ist insgesamt eher gering, da kann aber nur der Fahrtest Fakten bringen. Der Panhard-Bar reduziert das Axle-steering, d.h. die Achsen lenken nicht mehr beim Verschränken. Die hinteren Dämpfer sind länger als die vorderen. Ich habe erstmal 250er Öl eingefüllt, da nix anderes da war.
 Dig
DigEinbaubilder zum Dig fehlen leider. Das Dig-Kit und ein passendes Servo (4kg/cm reichen) sind wie das optional erhältliche Speedgetriebe (wer die Speedschnecken kauft, dran denken zwei Tüten zu kaufen. Eine Packung enthält nur eine Schnecke/Zahnrad-Kombi - Speedgetriebe hat 1:15) extra zu erwerben. Das Kit beinhaltet alles zur Befestigung Notwendige. Nur der Umwerferarm, der die „Kuppelscheibe“ verschiebt, ist schon im Baukasten dabei. Unverständlicherweise ist dieser aus Plastik, was der massiven Ausführung des restlichen Crawlers widerspricht. Da das Dig was kostet, ist Plastik an dieser Stelle schlecht. Hausaufgaben
Das Dig hat die Funktion 4WD, rear freewheel (Leerlauf Hinterachse) und Rearlock (gesperrte Hinterachse). Zwar sind Federn dabei, wo ich jetzt Spritschlauch eingebaut habe, hat mir die gute Fee aber mal geflüstert, dass da ein Schlauch definierter arbeitet. Ich hab die Federn nicht probiert, da ich gutgläubig bin.
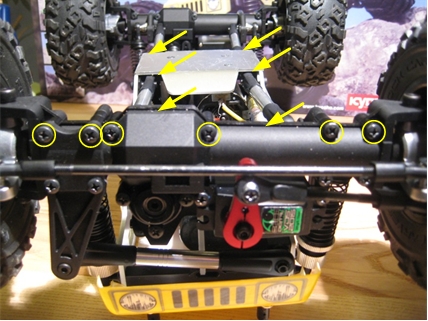
Generell ist der Digeinbau und das Setup unproblematisch. Beim Einbau muss man nur auf ordentliche Schmierung in allen Ecken achten und ggf. die kuppelnden Teile entgraten, was aber nicht wirklich notwendig. Die „Dauerposition“ des Digs ist der Allradantrieb, darum sollte das Servo in dieser Position möglichst lastfrei sein. Spart Getriebe und Strom. Darum sollte die Belastung geradlinig zwischen Servoachse und Angriffspunkt verlaufen (siehe Bild 4WD).
 Fahrtreglerwahl – same old…
Fahrtreglerwahl – same old…Leider gibt es keine Entwarnung bezüglich der Fahrtreglerwahl. Alle haben sich ja ein bisschen erhofft, dass sich jetzt mehr Auswahlmöglichkeiten bezüglich der Fahrtregler bieten. Dem ist aber nicht so. Der Antriebsstrang des Rockforce ist durch die schneckengetriebenen Achsen im Stillstand selbsthemmend und in diesem Zustand ist auch keine Dragbrake notwendig. Aus der Fahrt heraus zum Stillstand läuft der Antriebsstrang aufgrund seiner Leichtgängigkeit aber mitunter stark nach, je nachdem ca. eine Fahrzeuglänge. Dieses Verhalten benötigt zwingend eine Dragbrake. Der kleine Ausblick hier ist die Möglichkeit zumindest Regler-Motorkombinationen einzusetzen, die eine nach bisherigen Maßstäben „schlechte“ oder „schwache“ Dragbrake verfügen, da für den Nachlauf nur die Rotationsenergie des Antriebstranges verarbeitet werden muss, und nicht das gesamte Fahrzeug gebremst werden muss.
MotorFür den Wohnzimmertest habe ich zunächst die Blechbüchse eingebaut, da die Übersetzung von 1:143 schon immens ist. Wie erwartet fährt der Crawler selbst mit einem 27T-Motor langsamer als ein Scorpion mit 55T-Motor. Darum wird der Test mit dem tollen neuen 55T-Kyosho-Motor mit schrägen Kohlen vertagt. Dazu wird das Motorritzel-Hauptzahnradverhältnis von 20/87 zu 40/78 verändert. Damit ergibt sich eine Gesamtübersetzung von etwa 1:60, was für einen Standardcrawler ein guter Wert ist.
Soviel erstmal zum Trockentest.
Fahrtest folgt …
Und hier ist er, der Fahrtest:

Zum Fahrtest eines vorweg: ich habe bis auf die Rockcarver als Testreifen den Rockforce komplett im Baukastensetup betrieben, d.h. auch kein Blei in die Felgen.
Die Motorvariation zwischen Blechbüchse und 55T Motor ist letztendlich auch ergebnislos, da der 55T Motor in der Standardübersetzung wie gesagt viel zu langsam ist und er mit seinen ca. 50W Leistung bei der 1:2(40:78 ) Übersetzung zu wenig Dampf hat, und darum kurz vorm Exodus steht (wegen starker Hitze). Da ein Schneckengetriebe (die Achsen) nur selbsthemmend ist, wenn der Wirkungsgrad unter 50% liegt, muss der Motor entsprechend fast doppelt so viel unter Last leisten wie bei einem Kegelradachsencrawler. Dementsprechend fanden die Testfahrten mit Blechbüchse statt. Hierbei enstand natürlich ein entsprechender Getriebesound, da trotz der tollen Passgenauigkeit aller Teile der Motor mit fast der doppelten Drehzahl eines 55T-Motors in entsprechend geringer Fahrtgeschwindigkeit resultiert. Mit einer Blechbüchse gehen die Herren von Kyosho einen anderen Weg als andere renomierte Crawlerschmieden, was aber nicht unbedingt schlecht sein muss. Die einzigen Einbußen beim 27T-Motor ist halt die reduzierte Akkulaufzeit.

Was bei der ersten Ausfahrt etwas genervt hat, waren die losen Radmuttern, die wegen der scaligen Radmutterimitate nicht ordentlich festgezogen werden können. Das mitgelieferte Radkreuz hat vielleicht noch 1mm Überlappung mit der Radmutter im angezogenen Zustand. Die kleinen Scalemuttern können aber schnell weggedremelt werden, dann läufts.
Durch die relativ breit bauenden Achsen ist der Crawler aus dem Baukasten heraus schon sehr kippsicher seitwärts. Das ist natürlich immer ein Kompromiss bei der Tordurchfahrt, mit nur ca. 2cm mehr als beim Scorpion aber im grünen Bereich. Bei Überqueren von Hindernissen ist der Baukastenlenkeinschlag zu gering. Selbst das Dig hilft hier nur begrenzt. So müssen C-hubs(Lenkhebel) und die Cups der Antriebsachsen mit dem Senker o. Ä. nachbearbeitet werden. Sollte aber auch kein Problem darstellen. Das Dig funktioniert wie so viele seiner Art nur mehr oder weniger Lastfrei, was sicher teilweise zu Lasten des Plasikumwerferarms geht. Hier muss ein neues Teil her. Ob es dann besser funtioniert ist zwar nicht garantiert aber wahrscheinlich.
Die Steigfähigkeit ist aus dem Baukasten heraus begrenzt, hier sind das 6-zellige Stickpack und die mit 2,5mm Stärke sehr beefy ausgefallenen Chassisplatten maßgebend beteiligt. Schade ist hier nur, dass hier nicht so schnell ein großer Performancegewinn wie beim AX10 herausgearbeitet werden kann, da selbst bei einem tieferen Akkueinbau noch das massive Chassis da ist – zumal es noch etwas Kreativität bedarf, den 2/3-A Sechszeller zu verstecken. Hierfür wird es aber auch eine Lösung geben.

Die Verschränkung ist mir mit etwa 35% zu gering. Das Überfahren von verzwickten Situationen wird so etwas kippelig, da öfters nur drei von vier möglichen Rädern Bodenkontakt haben. Hier sehe ich auch Nachbesserungsbedarf. Generell fand ich die Funktion des Fahrwerks aber gut, besonders da hier ein per Kabelbinder halb eingefedertes Sprungsetup vorliegt. Man könnte höchtens nach Belieben die nächst härteren federn einsetzten, da so die Rückstellung ein wenig definierter wäre. Man sollte aber immer ein paar Kabelbinder dabei haben oder die Kabelbinder zum Abspannen durch eine dünne Kletterleine ersetzen, die diese Sollbruchstelle eliminiert. Die Achsen sowie die Skidplate sollten möglichst ausgiebig beschliffen werden, um scharfe Kanten abzurunden um Aufhänger zu vermeiden.
Das interessanteste am Ganzen sind natürlich die Achsen. Das Fahrgefühl mit den schneckengetriebenen Achsen ist natürlich ein ganz anderes, da besonders mit Dragbrake (siehe oben) nicht der geringste Nachlauf stattfindet. Hier gibt es ja den beliebten Kritikpunkt, dass an steilen Abschnitten ein kontrolliertes Abrollen einem den Hals retten kann. Das kann der Rockforce natürlich nicht. Andererseits gibt es ebenfalls Situationen mit „Standardcrawlern“ bei denen man ständig den Finger am Gas haben muss um nicht abzuschmieren. Hier muss man einfach ein Fahrgefühl für die Sache entwickeln. Ob sich schneckengetriebene Achsen durchsetzen werden oder nicht soll die Zeit und entsprechend viel mehr Erfahrung mit der Technik entscheiden. Insgesamt hat Kyosho einen sehr hochwertigen Wettbewerbscrawler mit interessanten Innovationen herausgebracht, auch wenn manche noch nicht ganz ausgereift sind. Aber selbst der Scorpion kommt nicht fertig aus der Kiste…
PS: Bald gibts einen interessanten und ausführlichen Bericht in einer nicht ganz unbekannten Spielzeugzeitung von einem nicht ganz unbekannten Forumsmitglied….
Gruß, Uli




 ...und das ist ja erst der Anfang :shock:
...und das ist ja erst der Anfang :shock: 




